Embodied Cognition in a Compliantly Engineered Robot
Project overview
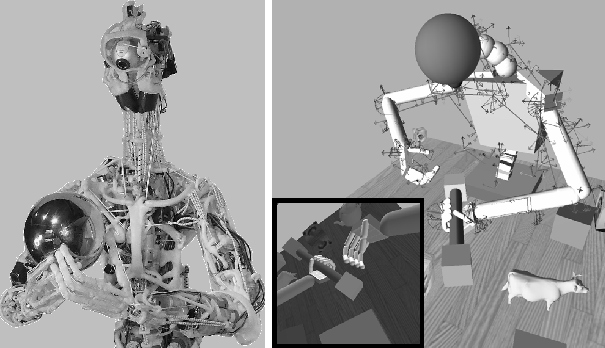
Standard humanoid robots mimic the human form, but the mechanisms used in such robots are very different from those in humans, and the characteristics of the robots reflect this. This places severe limitations on the kinds of interactions such robots can engage in, on the knowledge they can acquire of their environment, and therefore on the nature of their cognitive engagement with the environment.
However, a new kind of robot is being developed by this project consortium an anthropomimetic robot. Instead of just copying the outward form of a human, it copies the inner structures and mechanisms bones, joints, muscles, and tendons and thus has the potential for human-like action and interaction in the world.
Project objectives
The objectives of the project are:- To design and build an anthropomimetic robot torso mounted on a powered mobile platform
- To develop methods of characterising such robots in terms of the information flows emerging from their human-like intrinsic dynamics and sensory-motor coupling
- To investigate ways of controlling the robot during movement, interaction, and mobile manipulation, and to combine the successful control strategies in a single architecture deploying them appropriately according to circumstances and tasks
- To exploit the anthropomimetic nature of the robot in order to achieve some human-like cognitive characteristics through sensory-motor control
- To evaluate the functional and cognitive abilities of the robot, both absolutely, and in comparison with a state of the art conventional robot

Videos
| |People
- Dipl.-Ing. Michael Jäntsch
- Dipl.-Inf. (FH) Steffen Wittmeier
Partners
ECCEROBOT is a European Project; we closely work together with the following partners:- University of Sussex
- Artificial Intelligence Lab - University of Zurich
- School of Electrical Engineering - University of Belgrade
- The Robot Studio
Links
Press
The ECCEROBOT project appeared in the following media:| Aug 11, 2009 | "Anthropomimetic robot copies inner structures of human body" | IEEE Spectrum | Link |
| Aug 11, 2009 | "ECCEROBOT emulates your musculoskeletal system, looks like Beaker from the Muppets" | Engadget | Link |
| Aug 12, 2009 | "ecce robot" | Hack a day | Link |
| Aug 17, 2009 | "ECCEROBOT: not via Skynet, but might as well be" | Boing Boing | Link |
| Aug 18, 2009 | "Eccerobot" | Beyond the Beyond | Link |
| Aug 19, 2009 | "Robot with bones moves like us" | New Scientist | Link |
| Aug 28, 2009 | "Um robô igual a você - só que por dentro" | Trend Hunter | Link |
| Sep. 21, 2009 | "Freakishly Human Automatons" | Le Temps | Link |
| Mar. 25, 2010 | "Frankensteins Traum" | MIT Technology Review | print version only |
| Apr. 25, 2010 | "Frankensteins Traum" | Spiegel Online | Link |
| Jul. 21, 2010 | "I, Robot?" | New Electronics | Link |
| Aug. 23, 2010 | "Den Menschen Verstehen" | KEM | Link |
| Feb. 16, 2011 | "Watson gegen die Menschheit" | Der Spiegel | Link |
| Feb. 28, 2011 | "Inside the Mad Science of 7 Renegade Researchers" | WIRED | Link |
| May 10, 2011 | "Eccerobot" | Le Temps | Link |
Publications
| [1] | Michael Jäntsch, Steffen Wittmeier, Konstantinos Dalamagkidis, Guido Herrmann, and Alois Knoll. Adaptive Neural Network Dynamic Surface Control: An Evaluation on the Musculoskeletal Robot Anthrob. In Proc. IEEE International Conference on Robotics and Automation ICRA, pages 4347-4352, 2015. [ .bib | .pdf ] |
| [2] | Michael Jäntsch, Steffen Wittmeier, Konstantinos Dalamagkidis, Guido Herrmann, and Alois Knoll. Adaptive Neural Network Dynamic Surface Control for Musculoskeletal Robots. In Proc. IEEE Conference on Decision and Control CDC, pages 679-685, 2014. [ .bib | .pdf ] |
| [3] | Michael Jäntsch, Steffen Wittmeier, Konstantinos Dalamagkidis, Alexander Panos, Fabian Volkart, and Alois Knoll. Anthrob - A Printed Anthropomimetic Robot. In Proc. IEEE-RAS International Conference on Humanoid Robots (Humanoids), pages 342-347, 2013. [ .bib | .pdf ] |
| [4] | Michael Jäntsch, Steffen Wittmeier, Konstantinos Dalamagkidis, and Alois Knoll. Computed Muscle Control for an Anthropomimetic Elbow Joint. In Proc. IEEE/RSJ International Conference on Intelligent Robots and Systems IROS 2012, pages 2192-2197, 2012. [ .bib | .pdf ] |
| [5] | S. Wittmeier, A. Gaschler, M. Jantsch, K. Dalamagkidis, and A. Knoll. Calibration of a physics-based model of an anthropomimetic robot using evolution strategies. In Intelligent Robots and Systems (IROS), 2012 IEEE/RSJ InternationalConference on, pages 445-450, Oct 2012. [ DOI | .bib | .pdf ] |
| [6] | Michael Jäntsch, Christian Schmaler, Steffen Wittmeier, Konstantinos Dalamagkidis, and Alois Knoll. A scalable joint-space controller for musculoskeletal robots with spherical joints. In Proc. IEEE International Conference on Robotics and Biomimetics ROBIO 2011, pages 2211-2216, 2011. [ .bib | .pdf ] |
| [7] | Steffen Wittmeier, Michael Jäntsch, Konstantinos Dalamagkidis, and Alois Knoll. Physics-based Modeling of an Anthropomimetic Robot. In Proc. IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), pages 4148-4153, 2011. [ DOI | .bib | .pdf ] |
| [8] | Steffen Wittmeier, Michael Jäntsch, Konstantinos Dalamagkidis, Markus Rickert, Hugo Gravato Marques, and Alois Knoll. Caliper: A universal robot simulation framework for tendon-driven robots. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), pages 1063-1068, 2011. [ DOI | .bib | .pdf ] |
| [9] | Alan Diamond, Owen Holland, Richard Newcombe, Rob Knight, Steffen Wittmeier, and Michael Jäntsch. GPU-Powered Control of a Compliant Humanoid Robot. In nVidia GPU Technology Conference, San Jose, CA, 2010. [ .bib | .pdf ] |
| [10] | Michael Jäntsch, Steffen Wittmeier, and Alois Knoll. Distributed control for an anthropomimetic robot. In Proc. IEEE/RSJ International Conference on Intelligent Robots and Systems IROS 2010, pages 5466-5471, 2010. [ .bib | .pdf ] |
| [11] | Hugo Gravato Marques, Michael Jäntsch, Steffen Wittmeierand Christiano Alessandro, Max Lungarella, Rob Knight, and OwenHolland. ECCE1: the first of a series of anthropomimetic musculoskelal uppertorsos. In Proc. IEEE-RAS International Conference on Humanoid Robots 2010, 2010. [ .bib | .pdf ] |